
 DER PONG TISCH
DER PONG TISCH BT2CNC
BT2CNC IOT: PET-MONITORING
IOT: PET-MONITORING FILAMENT ÜBERSICHT
FILAMENT ÜBERSICHT



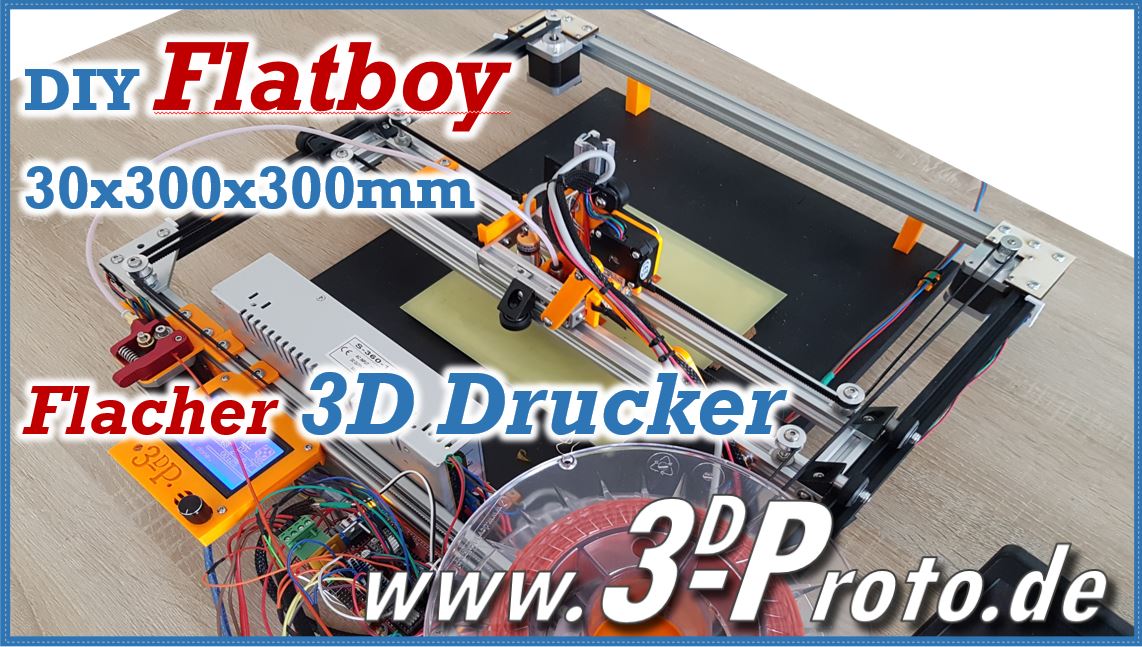










DIY 3D-Drucker mit CoreXY Aufbau.
Rahmenkonstruktion und Y-Achse - Z-Achsen - X-Achse mit Extruder - Elektronik - Anbauteile - Firmware (Marlin)
Kurzbeschreibung und Eigenschaften - Abstract and features
Aufbauanleitung und BOM des DIY 3D-Druckers in der CoreXY Topologie. Dabei bewegt sich der Extruder auf einer Ebene in X und Y- Richtung und das Heizbett bewegt sich in Z-Richtung.
Im Gegensatz zu einem H-Bot werden zwei Riemen verwendet und der XY-Schlitten wird an zwei Punkten jeder Seite des Schlittens verankert. Hauptmerkmal sind die sich überkreuzenden Riemen oder wie in diesem Fall zwei Riemenebenen.
Geringere Riemenlänge führen zu kleinerem Hysterese-Effekt beim Richtungswechsel und die beiden Ankerpunkte verhindern ein Drehmoment am Schlitten.
Hier die weiteren Eckdaten des 3D-Druckers:
- Core XY Aufbau
- Alles Open Source
- Großer Druckraum [mm] X:280 Y:300 Z:300
- Hotend: E3Dv6, 1.75mm, Direct Drive mit MK8
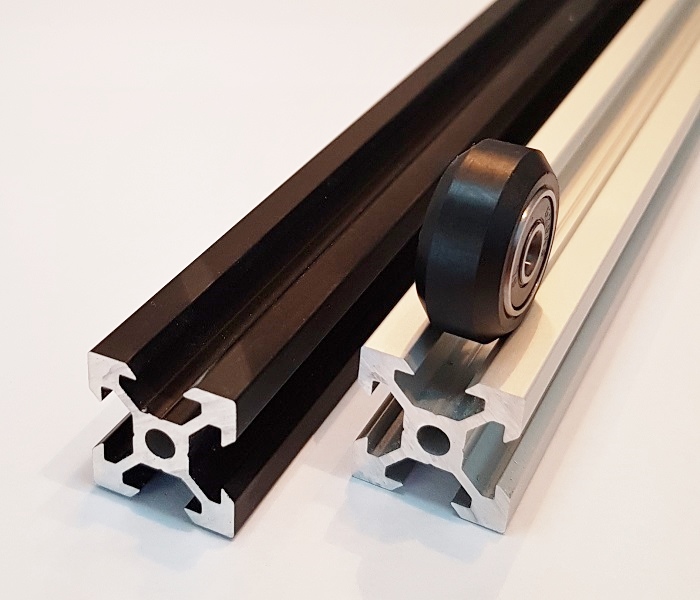
- Geräuscharme V-Slot-Rails für X und Y Achse
- Beheizbares Druckbett 300x300mm
- RAMPS Board Elektronik, kostengünstig
- Autobed Leveling mit Abstandssensor
- Marlin Firmware
- Trapezgewindestange für die Z-Achse
- Filamenthalter mit Führung des Filaments bis zum Extruder
- Optional über Octoprint gesteuert und überwacht
- Kosten: < 450 Euro. (Ohne Octoprint)



| Preview Video zum Druck mit dem 3D-proto CoreXY. |
Aufbau Schritt 1: Der Rahmen und die Y-Achse.
Bilder und Videos - Figures and videos


Komponentenliste des Rahmens inkl. der Y-Achse:
| Bauteil/Item | Stk./Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
| Aluprofile 20x20, V-Slot, 500mm | 13 | 500mm Länge |

|
| M5 Linsenkopfschrauben | 114 | M5 x 8mm, Innensechskant |
Amazon: |
| Nutsteine | 110 | M5, 6er Nut |

|
| M5 Linsenkopfschrauben | 32 | M5 x 10mm, Innensechskant |
|
| Winkel für Aluprofil | 36 | Um den Rahmen zu versteifen |

|
| GT-2 Riemen | 2 | 2000mm Länge, 6mm breit |
|
| Gedruckte Umlenkrollen mit Kugellager für die Ecken |
4 | 4 Stk. 625 ZZ 5 x 16 x 5 mm |
STL Umlenkrolle Oben 10mm STL Umlenkrolle Unten 7mm |
| NEMA 17 Halter obere zwei Ecken | 2 | STL Modell hier | 3D Druck |
| Umlenkrollenhalter 5 Loch Aluplatte | 2 | 4mm Stärke |
 |
| Sockel, Standfuss, M5 | 4 | STL Modell hier | 3D Druck |
| Endstop-Halter X, Y Achse | 2 | STL Modell hier. | 3D Druck |
| M5 Schraube + Sicherungsmuttern und Unterlegscheibe M5 |
2 | M5 x 25: für die Umlenkrollen |
|
Aufbau Schritt 2: Die Z-Achse.
Bilder und Videos - Figures and videos



Z-Achsen Komponentenliste für beide Seiten:
| Bauteil/Item | Stk./Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
| Rundstab aus Edelstahl, D:8mm | 4 | 4x480mm |
|
| Gleitlager | 6 | LM8UU |
Amazon: |
| Kabelbinder | 12 | 2,5mm x 10cm LM8UU Befestigung |
Bauhaus oder Ebay |
| Trapezgewinde | 2 | 400mm, TR8x1,5 oder T8 + passende 6 Kant oder Messing Mutter |
|
| M5 Linsenkopfschraube + Mutter | 12 | M5 x 10mm, Innensechskant selbstsichernde Mutter |
|
| Gewinde Kupplung für Schrittmotor Z-Achse | 2 | 5mm auf 8mm |
 |
| Z-Achsen Läufer | 1 | STL Modell hier, 50% Infill |
 |
| Halter für die Linearlager | 6 (3 pro Achse) | STL Modell hier, 70% Infill |
 |
| Nema 17 Halter Z-Achse | 2 | STL Modell hier, 70% Infill |
 |
| Rundstab Halter Oben | 2 | STL Modell hier, 35% Infill |
 |
| Rundstab Halter Unten | 2 | STL Modell hier, 50% Infill |
 |
| Holzplatte als Halterung des Heizbettes 300x300mm | 1 | 10mm x 445mm x 400mm | Bauhaus |
Aufbau Schritt 3: X-Achse, Läufer und Extruder.
Bilder und Videos - Figures and videos
Der X-Schlitten existiert in zwei Versionen. Mit gedrucktem Schlitten als Version 1 und mit Aluminium-Rahmen in der Version 2. Vorteil des Alurahmens ist die mögliche Erweiterung mittels Nutsteinen auf den seitlichen Aluprofilen.
Eine Erweiterung mit Bauteil-Lüfter ist für die nahe Zukunft angedacht. Ausserdem ist der Aluminium Rahmen steifer und und die Riemen können strammer gespannt werden.






X-Achsen und Läufer Komponentenliste:
| Bauteil/Item | Stk./Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
| Aluprofile 20x20 für V-Slot rails | 2 4 1 |
456mm: X-Achse 80mm: X-Achse und Läufer 42mm für den Läufer |
Zugeschnitt im
|
| V Slot Rail Rad Komplettsatz | 9 | 3x mit dezentrischem Abstandshalter und 6x zentrischem Abstandhalter, H:6mm |

|
| Beidseitige V-Rail Rollen Halterecken, schwarz | 9 | Aluminiunum, gefräst |

|
| Umlenkrollen für die X-Achse | 4 | Aus Aluminium, D_innen: 10mm, 5mm Bohrung |

|
| Nema 17 Halterplatte Aluminium | 1 | Befestigung Nema 17 auf Halterplatte und Schlitten |
Drucker Baussatz
|
| Kabelbinder | 4 | 2,5mm x 10cm Zur GT2 Riemen Befestigung |
Drucker Baussatz |
| Hinged Direct Drive Extruder mit E3Dv6 | 1 | Link zu den Komponenten auf Thingiverse 3 STLs notwendig: E3Dv6 Extruder, Halter und Idler. |
|
| X Wagen Haken vorne mit M18 ABL Sensor und hinten | 2 | STL Modell Haken vorne M18 und hinten |
3D Druck mit 70% Infill drucken |
| Halter Kabelmanagement | 1 | STL Modell hier | 3D Druck |
Schritt 4: Die Elektronik:
Hinweise zur Verkabelung:
Schrittmotor Kabel werden folgendermaßen verkabelt: Blau (2B), rot (2A), gruen (1A), schwarz (1B).
Zmin Endstop ist der Abstandssensor (Siehe hierzu die Autobed Leveling Erklärungen).
Relais für das Heizbett gemäß folgender Anleitung anschließen.
Verwende momentan Schrittmotor Treiber "E2" für die zweiten Z-Achse, um den Z-Achsen Treiber zu entlasten.
Bilder und Videos - Figures and videos

Elektronik Komponentenliste:
| Bauteil/Item | Stk./Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
| RAMPS 1.4 Shield + Arduino MEGA Klon + 5 x Schrittmotor Treiber inkl. Heatsink und USB Kabel |
1 |

|
|
| kapazitiver Abstandssensor zum Auto-Bed-Leveling | 1 |
Autobed Leveling Set im Shop |
|
| 300x300mm Bigbed 24V Heizbett oder 300x300mm 230V Silikonheizmatte |
1 |
Bigbed auf www.reprap.me |
|
| 300x300x8mm präzisionsgefäste Aluplatte | 1 | Druckauflage: 0,5mm FR4 Platte Angeschleift mit 320ger Sandpapier |
|
| Hotend E3dv6 inkl. Heizer Patrone und Thermistor | 1 | Direct Drive Set, nicht Bowden |
|
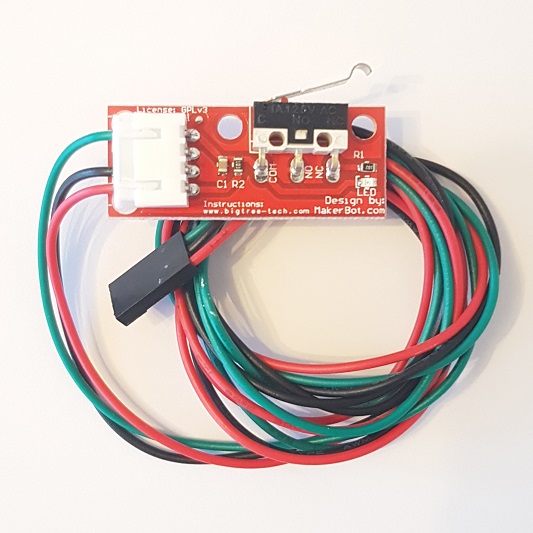
| Mechanischer Endschalter | 2 | Für X und Y Achse |
|
Schrittmotor | 4 1 |
Nema 17, 4800gcm Nema 17, 4200gcm, 40mm |
|
20 Zahn Pulley | 2 | Für eine 5mm Welle |
|
| Mehrere DuPont Kabel/Buchsen | 10 | 5 x 4 Polig (Schrittmotoren) 2 x 2 Polig (Thermistoren) |
|
| 12V Netzteil | 1 | 360W |
|
| 24V Netzteil zum 300x300 BigBed | 1 | 600W |
|
| Optional Zur Fernüberwachung mit Octoprint: Raspberry Pi 2 Model B Set |
1x Set | mit passendem Gehäse, Netzteil WLAN Dongle, 16GB SD Karte Anleitung zum Einrichten auf www.octoprint.org |
|
Schritt 5: Die Anbauteile (Spulenhalter, Kabelmanagement, optional LCD Display, Bauteil-Lüfter):
Bilder und Videos - Figures and videos


Komponentenliste der Anbauteile:
| Bauteil/Item | Stk./Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
| Aluprofil 20x20, Nut 5, 500mm | 2 | Spulenhalter Zuschneiden auf 100mm |
|
| Winkel für Aluprofil | 3 | 1x für Rollenhalter & 2x für Webcam Halter |

|
| M5x8 Linsenkopfschrauben mit Innensechskannt | 9 | Befestigung des Spulenhalters & Webcam Halters und des PTFE Schlauchs |
|
| Rollenhalter Abschlusskappe | 1 | STL Modell hier | 3D Druck |
| Webcamhalter Abschlusskappe | Optional | STL Modell hier | 3D Druck |
| FTFE Schlauch | 0,6m Aussendurchmesser: 4mm, Innen: 2mm |
STL Modell Halter am Rahmen und am Extruder | 3D Druck |
| RepRap LCD SmartDisplay | 1 | Optional. Damit kann auch von SD gedruckt werden. |
|
| Display Halterung | 1 | STL Modell hier | 3D Druck |
| M5x10 Linsenkopfschraube mit Innensechskannt | 3 | Befestigung des Displays |
|
| Klip zur Kabelbefestigung | ca. 20 | STL Modell hier | 3D Druck |
| Webcam Halter Logitech C270 zur Überwachung mit Octoprint | 1 | STL Modell hier | 3D Druck |
| Halter Kabelmanagement | 1 | STL Modell hier | 3D Druck |
| Bauteil-Lüfter 4010 | 1 | STL Modelle hier |
3D Druck, Design by Ingo Arndt, Danke dafür! |
Marlin Firmware:
Die aktuell aufgespielte und in Betrieb genommene Firmware Marlin 1.1.9. mit Autobedleveln als Zip File findet ihr hier. Kann mit der Arduino IDE 1.8.7. geflashed werden.
Die Bibliothek U8glib Version 1.17 für das LCD Display muss für die Firmware hier herunterladen werden.