
 DER PONG TISCH
DER PONG TISCH BT2CNC
BT2CNC IOT: PET-MONITORING
IOT: PET-MONITORING FILAMENT ÜBERSICHT
FILAMENT ÜBERSICHT



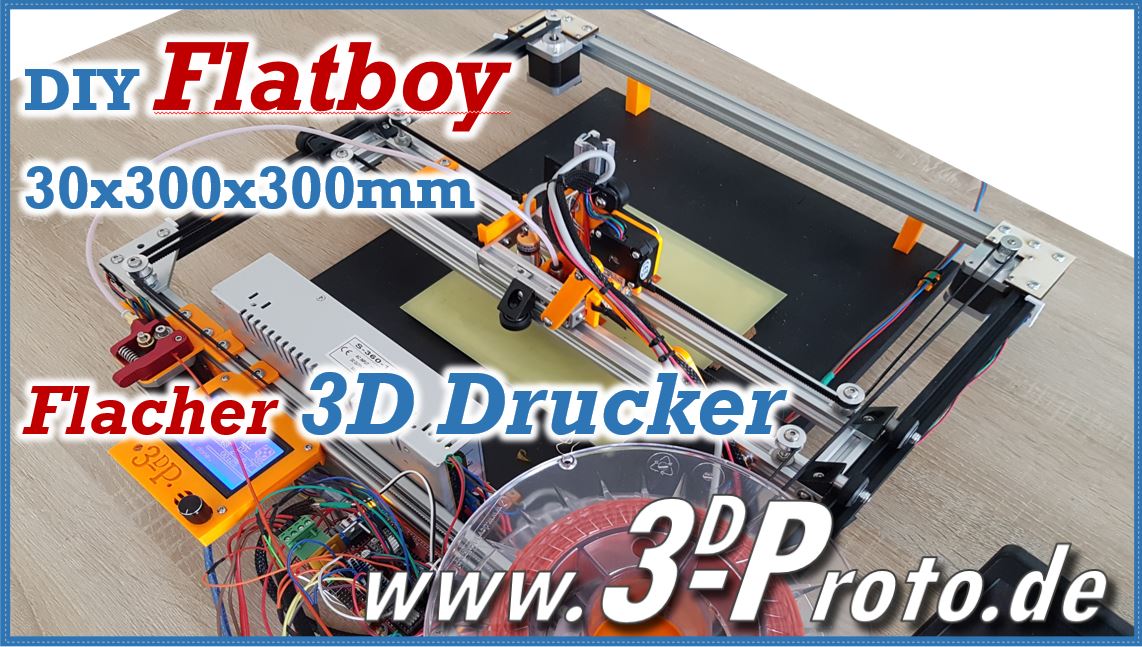










DIY Flacher CoreXY 3D-Drucker "Flatboy".
Hardware Komponenten - Gedruckte Komponenten (STLs) - Elektronik - Firmware (Marlin).
Kurzbeschreibung und Eigenschaften - Abstract and features
Aufbauanleitung und BOM des DIY Flatboys in der CoreXY Topologie. Dabei bewegt sich der Schlitten mit Hotend oder Laser auf einer Ebene in X und Y- Richtung. Z-Achse wurde hier nicht verbaut.
Im Gegensatz zu einem H-Bot werden zwei Riemen verwendet und der XY-Schlitten wird an zwei Punkten jeder Seite des Schlittens verankert. Hauptmerkmal sind die sich überkreuzenden Riemen oder wie in diesem Fall zwei Riemenebenen.
Geringere Riemenlänge führen zu kleinerem Hysterese-Effekt beim Richtungswechsel und die beiden Ankerpunkte verhindern ein Drehmoment am Schlitten.
Hier die weiteren Eckdaten des Flatboys:
- Core XY, superflacher Aufbau
- Möglicher Arbeitsraum bis zu [mm] X:300 Y:300 Z:30mm
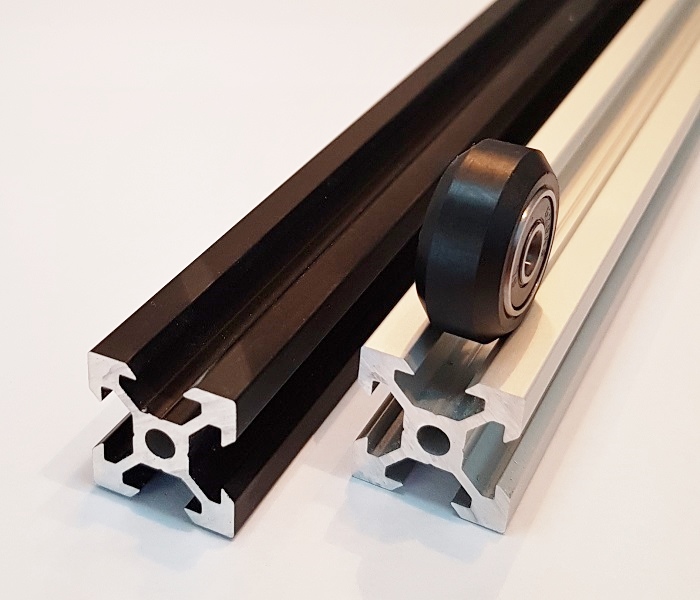
- Geräuscharme V-Slot-Rails für X und Y Achse
- BTT SKR 1.4 Board Elektronik, 32bit
- Mit geräuscharmen TCM2130 Treiber für X und Y Achse
- Sensorless Homing auf der X-Achse
- 12 V, 25 A Netzteil
- Marlin 2.0.x Firmware
- Stand-Alone mit LCD Display, Betrieb über SD Karte
Bilder und Videos:

|
|---|
| 3D-Proto Flatboy aktuelle Version 2.0 |

|
|---|
| 3D-Proto Flatboy aktuelle Version 2.0 |
| Schritt für Schritt Aufbauvideo. |
| Version 2.0 mit SKR 1.4 Board, Video zur Verkabelung. |
Komponentenliste Hardware:
| Bauteil/Item | Stk./Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
| Aluprofile V-Slot 20x20mm und 20x40mm |
4 Stk. 20x20 1 Stk. 20x20 2 Stk. 20x40 1 Stk. 20x20 1 Stk. 20x20 1 Stk. 20x20 1 Stk. 20x20 |
500mm: Rahmen 100mm: X-Schlitten, mit beidseitigem M5 Gewinde, 5mm Loch mittig 80mm : X-Achse (Umlenkrollen-Halter) 418mm: X-Achse 90mm : Z-Achse, einsetig mit Gewinde 90mm : Extruder-Halter (5mm Loch bei 80mm) 90mm : HotEnd-Halter an der Z-Achse |
|
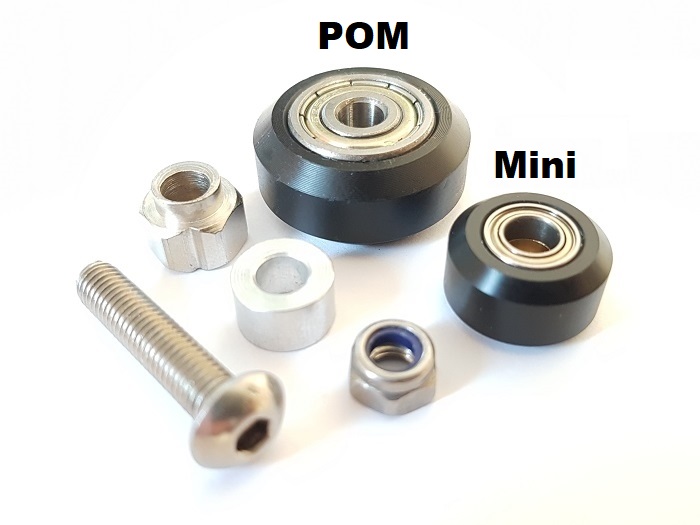
| Linsenkopf-Schrauben, Innensechskant |
1 50 4 4 4 1 4 4 10 10 2 |
M5 x 8mm: Madenschraube M5 x 8mm M5 x 20mm: 1x Filament Umlenkrolle und optional 3x Kabeltrommel M5 x 20mm: Universeller Spulenhalter M5 x 25mm: Umlenkrollen: X-Achse M5 x 30mm: Extruder Halter M5 x 35mm: Umlenkrollen: X-Achse und Ecken M5 x 60mm: Senkkopfschrauben für die Anstandshalter zur Holzbodenplatte M3 x 8mm: Für Nema Motor-Halter M3 x 16mm: Für die Board/LCD-Halter M3 x 30mm: Hotend MK8-Halter |
|
| Nutsteine | 70 4 |
M5, 6er Nut M5, Flach |

|
| Unterlegscheiben |
20 12 |
5,5/15mm Durchmesser 5,5/9mm Durchmesser für die Umlenkrollen |
|
| Umlenkrollen für die X-Achse | 8 | Aus Aluminium, D_innen: 10mm, 5mm Bohrung |

|
| Eckverbinder Aluminium Guss | 4 | X-Achse |

|
| Kugellager 625zz | 3 | 2x Spulenhalter, 1x Umlenkrolle Filament | |
| Beidseitige V-Rail Rollen Halterecken | 9 | Alu, schwarz |

|
| V-Slot Platte | 1 | für die Z-Achse |

|
| GT-2 Riemen | 1 | 4000mm Länge, 6mm breit | |
| Umlenkrollenhalter 5 Loch Aluplatte | 2 | 4mm Stärke |
 |
| V Slot Rail Rad Komplettsatz für Achsen und Läufer | 12 | zusätzlich 4 Stk. dezentrische Abstandshalter |
 |
| 20 Zahn Pulley, 5mm Bohrung | 3 | Für die 3 Nema 17 Motoren |

|
| Kabelbinder | ca. 10 | 2,5mm x 10cm | Bauhaus oder Ebay |
| Holzplatte 12mm Stärke | 1 | 400mm x 500mm | Bauhaus |

|
|---|
| 3D-Proto Flatboy Z-Achse, Rückansicht |

|
|---|
| 3D-Proto Flatboy Z-Achse, Front |
3D gedruckte und Laser geschnittene Teile:
| Anzahl/STL/Bauteil | Abbildung | Anzahl/STL/Bauteil | Abbildung |
|---|---|---|---|
| 2 Stk. NEMA 17 Halter obere zwei Ecken |

|
1 Stk. Endstop-Halter Y Achse |

|
| 1 Stk. Bauteillüfter Halter, für 40x40 Radiallüfter |

|
1 Stk. Bauteillüfter Auslass, für 40x40 Radiallüfter |

|
| 4 Stk. Abstandshalter Holzplatte |

|
1 Stk. Z-Achsen MK8 Hotend Halter, mit Adapter für den BL-Touch oder 3D-Touch |

|
| 2 Stk. GT2 Riemen Hacken an X Schlitten |

|
1 Stk. Hotend MK8 Lüfter Halter |

|
| 1 Stk. Extruder MK8 Nema17 Halter, jetzt seitlich angebracht |

|
1 Stk. Z-Achsen Nema 17 Halter und Extruder Nema 17 Halter |

|
| 1 Stk. Filament Umlenkrolle |

|
1 Stk. Abstandshalter für den Extruder Halter |

|
| 1 Stk. Z-Achsen Stütze |

|
2 Stk. Zugentlastung 230V Kabel |

|
| 1 Stk. Kabelmanagement zum Schlitten |

|
3 Stk. Kabelmanagement |

|
| 1 Stk. SKR 1.4 Board Halter |

|
1 Stk. Alternativ: RAMPS Board Halter |

|
| 1 Stk. LCD Display Halter |

|
2 Stk. Universal Spulenhalter |

|
| 1 Stk. Endanschlag für die X-Achse |

|
2 Stk. OPTIONAL: Edding Halter |

|
1 Stk. OPTIONAL: Laserhalter |

|
2 Stk. OPTIONAL: Controllerhalter für Laser |

|

|
|---|
| Umlenkrollen auf der X-Achse |

|

|
| Eck-Umlenkrollen | Nema 17 Halter an den Ecken, zum Spannen der Gt2-Riemen |
Komponentenliste Elektronik:

|
|---|
| Update auf SKR 1.4 Turbo Board mit 32Bit. Verkabelung am Board. |
Hinweise zur Verkabelung:
- 3D-Touch oder BL Touch als Z-Endstop und Probe
- X und Y Treiber sind TMC2130 mit SPI, 4 Jumper unter dem Treiber wie ober in schwarz dargestellt setzen.
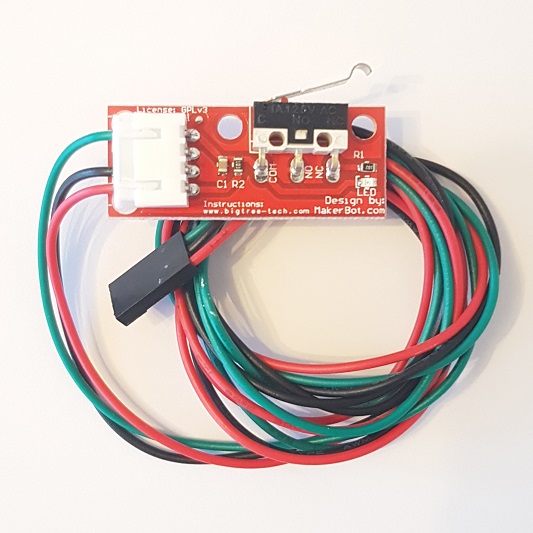
- X Treiber für Sensorless Homing ohne mechanischen Endstop, Y-Achse besitzt mechanischen Endstop (an E1 angeschlossen).
- Z und E0 Treiber sind DRV8825 Standalone mit 32 Mikroschritten, 4 Jumper unter dem Treiber wie ober in schwarz dargestellt setzen.
- Full Graphic LCD Display über EXP1 und EXP2 angeschlossen
- 12 oder 24V Netzteil kann verwendet werden. Lüfter und Heipatronen müssten dann auch auf 12 oder 24 V ausgelegt sein.
- Hotendlüfter ist Temperaturgeregelt über E1 Ausgang
- 210x210 MK3 Aluminium Heizbett mit 100k Epcos: B57621C104J62 SMD 1206 (4.7k pullup) Thermistor
- MK3 Hotend und Coldend, bekannt aus dem Ender 3
- Steckverbinder sind alle JST XH mit 2.54mm Raster
Elektronik Komponentenliste:
| Bauteil/Item | Stk./Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
| SKR 1.4 Turbo Board mit Treibern | 1 |
SKR 1.4 Turbo auf Ebay
Oder auf Amazon:  |
|
| BL Touch oder 3D-Touch | 1 |
3D-Touch auf Ebay
Oder auf Amazon:  |
|
| Reprap Discount Full Graphic Smart Controller | 1 |
auf Amazon: |
|
| Mechanischer Endschalter | 1 | Für Y Achse |
|
Schrittmotor | 3 1 |
Nema 17, 40mm, 4200gcm Nema 17, Flach, 25mm |
|
| Mehrere JST XH Stecker mit 2.54mm Raster |
4
2 3 |
4pin für Nema17 3pin für 1x Y-Endschalter und BL-Touch oder 3D-Touch 2pin für Thermistor und BL-Touch oder 3D-Touch |
JST Stecker auf Ebay |
| 12V oder 24V Netzteil | 1 | Aktueller Aufbau mit 12V und 30A -> 360W |
auf Amazon: |
| Heizbett | 1 | 12V oder groß mit 24V, passend zum Netzteil | |
| MK8 Extruder und Hotend MK8 | 1 | 12V oder 24V Hotend, passend zum Netzteil |
auf Amazon:  |
| Optional Zur Fernüberwachung mit Octoprint: Raspberry Pi 2 Model B Set |
1x Set | mit passendem Gehäse, Netzteil WLAN Dongle, 16GB SD Karte Anleitung zum Einrichten auf www.octoprint.org |
|

|
|---|
| Anschlüsse des BTT SKR1.4 (Turbo) Boards. |

|
|---|
| Hotend MK8 mit Lüftern und 3D-Touch |

|

|
| Neuer Extruder-Halter mit Filament-Umlenkung | Neuer, universeller Filamentrollen-Halter |

|
|---|
| Reprap Smart Graphik LCD Display mit gedrucktem Rahmen |
Marlin Firmware:
Die aktuell aufgespielte und in Betrieb genommene Firmware Marlin 2.0.x. als Zip File findet ihr hier.
Kann mit Visual Studio Code (siehe unten Screenshot) und dem PlatformIO Addon auf SD-Karte compiliert und geflashed werden.
Die Firmware ist folgendermaßen konfiguriert (Anpassungen an euren Aufbau/Elektronik solltet ihr entsprechend durchführen):
- Core XY
- SKR 1.4 Turbo Board, 32bit
- Alle Pulleys haben 20-Zähne
- X, Y Achse mit TMC2130 V1.1 mit 1/16 Schritte, X-Achse mit Sensorless Homing, Y-Achse Endstop
- Alle Stepper haben 200 Vollschritte/U
- Z Achse und Extruder DRV8825 mit 1/32 Schritte
- MK8 Extruder und Hotend, 100k beta 3950 1% Thermistor (4.7k pullup)
- Full Graphic LCD Display
- EEPROM schreiben aktiviert
- 3D-Touch, Sensor ist Endstop
- 210x210 MK3 Aluminium Heizbett mit 100k Epcos: B57621C104J62 SMD 1206 (4.7k pullup) Thermistor

|
|---|
| Visual Studio Code mit PlatformIO Addon |