
 DER PONG TISCH
DER PONG TISCH BT2CNC
BT2CNC IOT: PET-MONITORING
IOT: PET-MONITORING FILAMENT ÜBERSICHT
FILAMENT ÜBERSICHT











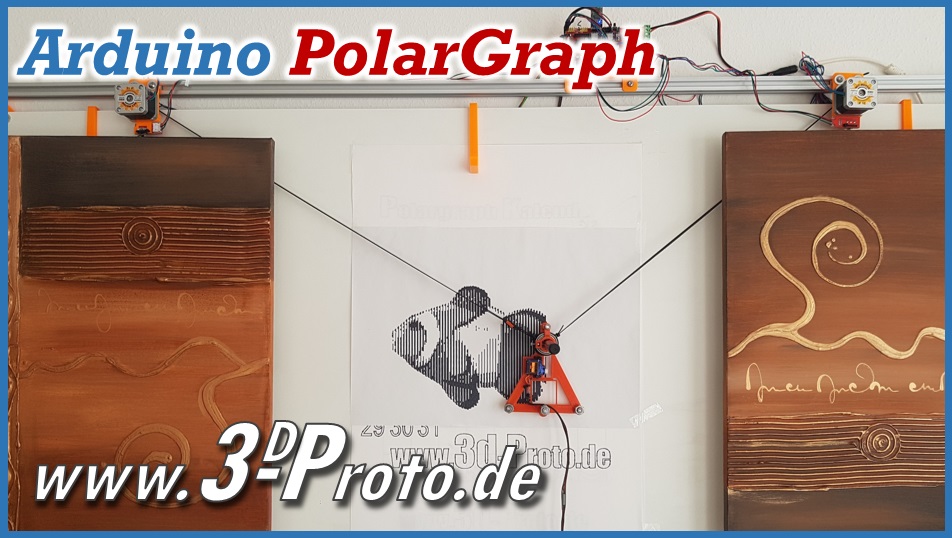



XL Polargraph mit Arduino Ramps und Bluetooth HC06.
Hardware Komponenten - Elektronik - Firmware auf dem Arduino Mega - Toolkette, Makelangelo
Kurzbeschreibung und Eigenschaften - Abstract and features
Aufbauanleitung und BOM des DIY Polargaraphs mit Arduino Mega + RAMPS Shield. Alles gesteuert über die Makelangelo Firmware.
Hier die weiteren Eckdaten des Plotters:
- Einfacher Aufbau
- Großer, variabler Plottraum
- Arduino gesteuert, mit RAMPS
- Wireless über Bluetooth
- 12 V, 2,5 A Netzteil
- Makelangelo Firmware
- Makelangelo Software
Bilder und Videos:

|
|---|
| Arduino Polargraph |
| Aufbau Video, Toolkette |
Komponentenliste Hardware:
| Beschreibung/Description | Anzahl/Pcs | Hinweis/Hint | Link zum Händler/Dealer |
|---|---|---|---|
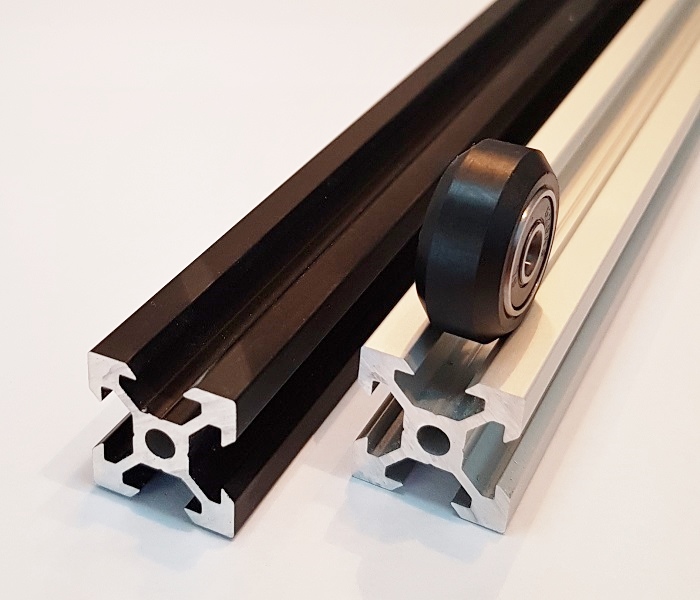
| V-Slot Aluprofile 20x20 | 1 | 1000mm, 20x20 |
|
| Linsenkopf-Schrauben, Innensechskant (Sicherungs-)muttern |
4 10 4 5 4 4 10 1 |
M5 x 35mm M5 x 16mm M5 x 8mm M3 x 16mm: Arduino Halter M3 x 10mm: Nema 17 Halter M3 x 8mm: Nema 17 Halter Sicherungsmuttern M5 Muttern M3 |

|
| Nutsteine | 10 | M5, 6er Nut |

|
| Unterlegscheiben | 4 | 5,5/9mm Durchmesser für die Montage Holzplatte | |
| Kugellager | 3 | 61804 - 20 x 32 x 7 mm, für die Gondel | Ebay |
| GT2 Pulley für Nema17 | 2 | 5mm Bohrung, 20 Zähne | |
| GT-2 Riemen | 1 | 3000mm Länge, 6mm breit |
|
| Kabelbinder | 10 | 2,5mm x 10cm | Bauhaus oder Ebay |
| Multiplex Holz Platte | 1 | 6mm Stärke, 700x1000mm oder Größer | Bauhaus oder Ebay |
| Marker, z.B. Rex oder Edding | 1 | Permanent, ~15mm Durchmesser | Bauhaus oder Ebay |
3D gedruckte Teile:
| Beschreibung Anzahl STL Datei |
Abbildung | Beschreibung Anzahl STL Datei |
Abbildung |
|---|---|---|---|
| Arduino Halter 1 Stk. STL hier. |

|
GT2 Koppler 2 Stk. STL hier |

|
| Endstop Halter 2 Stk. STL X-Achse hier |

|
Endstop Platte 2 Stk. STL hier |

|
| Nema17 Halter 2 Stk. STL hier. |

|
Eddinghalter Teil1 (Gondelplatte) 1 STL hier |

|
| EddingHalter Teil2 1 Stk. STL hier |

|
Abstandshalter Holzplatte zur Wand 2 Stk. STL hier |

|
| Wandhaken 2 Stk. STL hier |

|
Endkappe Aluminium Profil 2 Stk. STL 4mm hier |

|
Komponentenliste Elektronik:
| Abbildung | Lieferumfang | Preis zzgl. Versand Versandkosten |
Paypal Zahlung |
|---|---|---|---|

|
Elektronik Paket zum Aufbau des Polargraphen. Lieferumfang: - Arduino Mega - RAMPS 1.4 Board - Netzteil mit 12V - 2 Stk. Nema17 - 2 Stk. Drv8825 Treiber mit Heatsink - 1 Stk. Servo SG90 - 2 Stk. Endstops - 1 Stk. Hohlbuchse |
59€ Versandkosten innerhalb Deutschlands: 5,95€ |
|
Hinweise zur Verkabelung:
1.) Um den Servo zu aktivieren (5V Versorgung) muss der Jumper rechts neben dem Servo Stecker zwischen Vcc und 5V gesteckt werden.
2.) Unter den Schrittmotor Treibern befinden sich 3 Jumper Steckplätze, bei Nutzung der DRV8825 mit 32 Mirkroschritten (aktuell in der Firmware gesetzt) müssen alle 3 Jumper pro Treiber gesteckt sein.
3.) Der Treiberstrom der Schrittmotoren wird über die kleinen Kreuzschlitz-Potentiometer auf dem Treiber eingestellt. Bei Nutzung der DRV8825 kann hier 0,5V eingestellt werden (gemessen zwischen Potentiomenter und GND).
Dies entspricht einem Strom von 1A für die Schrittmotoren. Diese Stromstärke ist für die Anwendung ausreichend.

|
|---|
| Anschlüsse des RAMPS Shields |
Software
Firmware auf dem Arduino Mega
Die Firmware auf dem Arduino Mega basiert auf dem Makelangelo Firmware mit Anpassungen zu Hardware. Hier der Link zum Download.
Über die Arduino IDE kann diese auf den Arduino Mega geflashed werden. Diese Firmware unterstützt unter anderem folgende spezifischen G-Code:
G28 //Homing
M114 //Aktuelle Position melden
D7 LXXX RXXX //GT2 Länge eintragen
D8 //GT2 Länge lesen
D9 //GT2 Länge in EEPROM schreiben
M101 A[n1]T[n2]B[n3] //Software Limits schreiben
//z.B. M101 A0 T500 B-500 -> X-Achse: +/-500mm
Toolkette, über Makelangelo G-Code an USB oder das Bluetooth Modul schicken.
Als G-Code Sender über USB oder Bluetooth-Modul wird Makelangelo genutzt. Hier der Link zum Download.
Und so kann man in wenigen Schritten G-Code schicken und das erste Bild zeichnen:
1.) Makelangelo.zip entpacken
2.) JAVA installieren
3.) Im Makelangelo Verzeichnis für Windows start windows.bat ausführen.
4.) Arduino Mega entwedet über Kabel und USB oder per Bluetooth verbinden mit Connect. Wichtig: Die Firmware überträgt mit 57600 Baud.
5.) Nach dem Start von Makelangelo, unter Settings->Makelangelo 3.0-3.2 auswählen.
6.) Breite [mm] und Höhe [mm] und Acceleration (Startwert 60mm/s^2) einstellen, Blatt Größe und Servo Up/Down einstellen und prüfen. Liftspeed habe ich auf 160mm/s eingestellt.
7.) Bei Nutzung der Homing Funktion (G-Code: G28) mit Endstops muss die GT2 Riemenlänge ausgemessen und über G-Code eingetragen werden (D7 LXXX RXXX [mm]).
8.) Mit G-Code D9 Riemenlänge speichern.
9.) Homing testen (G28)
10.) Bild öffnen und Zeichenstil auswählen
11.) Start drücken

|
|---|
| Makelangelo Software |