DER PONG TISCH
DER PONG TISCH BT2CNC
BT2CNC IOT: PET-MONITORING
IOT: PET-MONITORING FILAMENT ÜBERSICHT
FILAMENT ÜBERSICHT













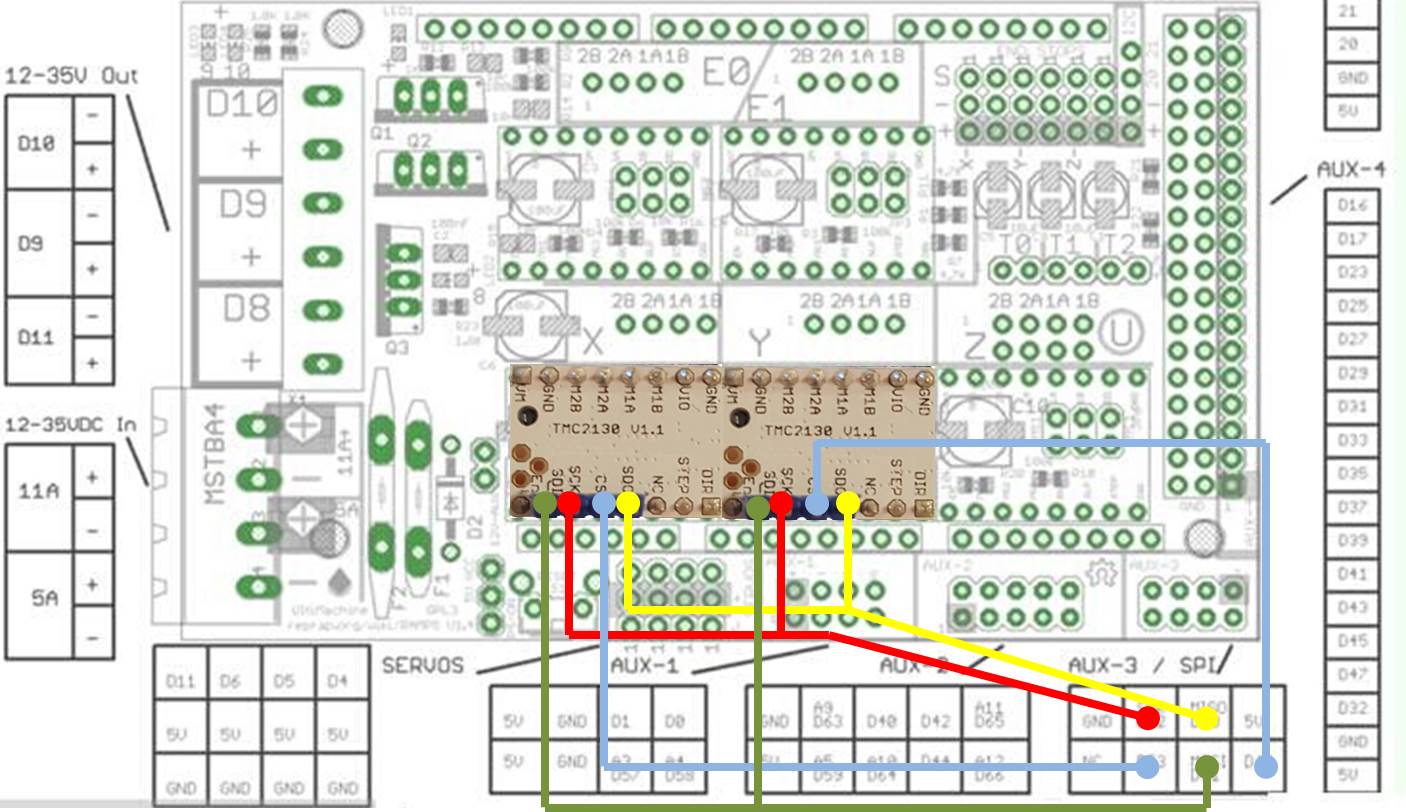
Marlin Firmware TMC2130 - Video - Verkabelung TMC2130 (RAMPS)
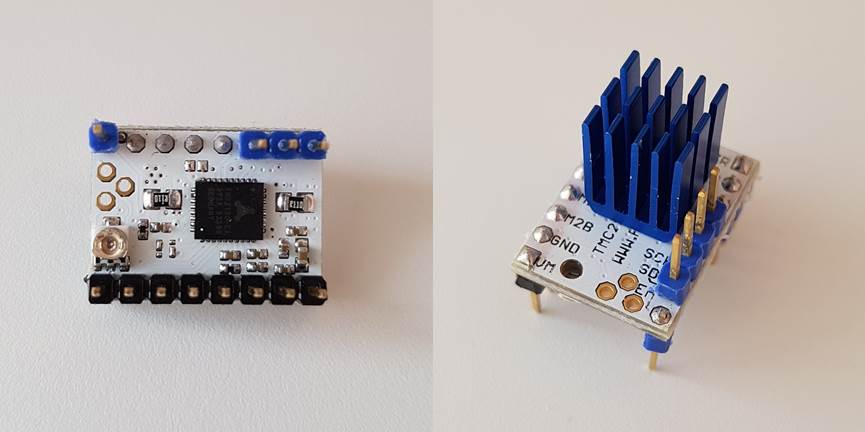
Neu im Shop: Schrittmotor Treiber TMC2130 V1.1 (SPI) mit Kühlkörper und 4-Pol Dupontkabel.
| Abbildung | Lieferumfang | Preis zzgl. Versand Versandkosten |
Paypal Zahlung Gesamtkosten |
|---|---|---|---|
|
Lieferumfang: Trinamic TMC2130 Schriitmotor Treiber auf Trägerplatine mit Kühlkörper und 4-Pol Dupontkabel zum Anschluss der SPI Kommunikation zum Board. | 8,50€ Versand innerhalb Deutschlands: 2,75€ |
|
Schrittmotor Treiber einstellen
Die Schrittmotoren werden über einen Treiber-IC angesteuert. Diese ICs werden auf Trägerboards aufgelötet, die auf die
gängigen RepRap-Druckersteuerungen (RAMPS, RUMBA, u.v.m.) einfach aufgesteckt werden können.
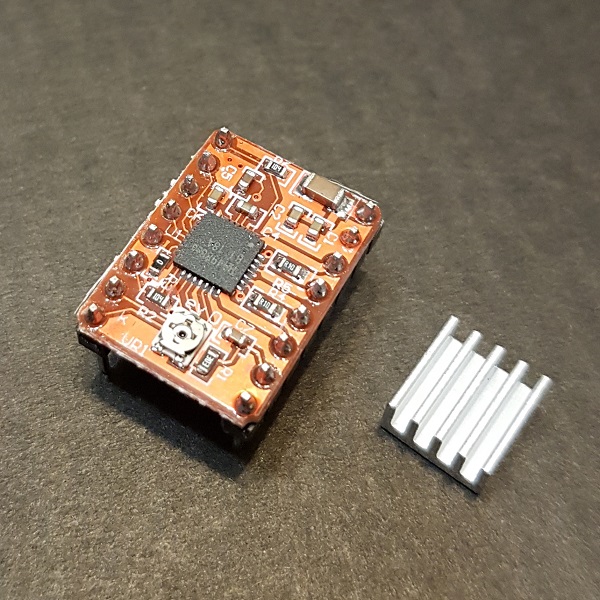
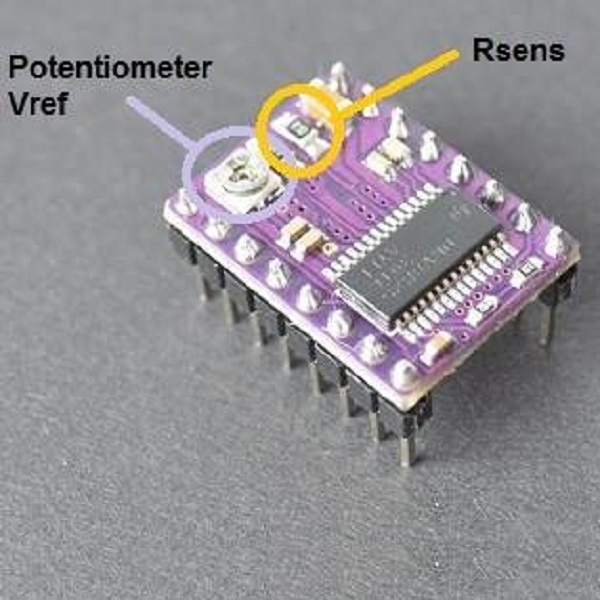
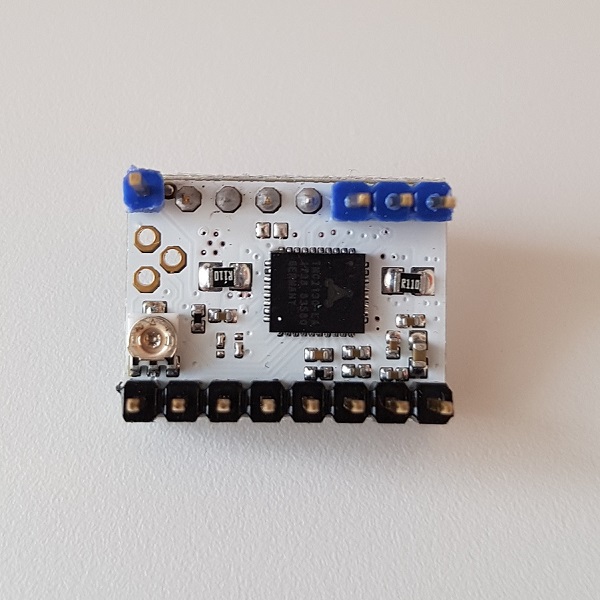
Auf den Bildern ist der A4988, der DRV8825 und der TMC2130 auf dem Trägerboard dargestellt. Den kraftvollen und gleichzeitig leisen TMC2130 mit SPI Firmware Konfiguration gibt es aktuell im Shop.
Die Referenzspannung Vref, die mit dem Multimeter direkt auf dem Potentiometer gegen Masse gemessen werden kann, sollte nach unterer Tabelle eingestellt werden.
Zu beachten ist, das R_sens nach Trägerboard Version auch mal variieren kann. Im Zweifelsfall sollte dieser Wert geprüft werden.
Die folgenden Formeln zeigen die Berechnung der Motorströme aus den Treibern. Beim TMC2130 kann der Strom und Mikroschritte über die Firmware eingestellt werden (siehe unten):
IA4988 = Uref / (8*Rsens)
IDRV8825 = Uref / (5*Rsens)
| Variante | A4988 | DRV8825 | TMC2130 |
|---|---|---|---|
| Dauerstrom | 2 A | 2,5 A | 1,4 A |
| V_ref bei R_sens | 0,8 V bei 0,05 Ohm | 1 V bei 0,1 Ohm | R_sens = 0,11 Ohm |
| Max. Mikroschitte | 1/16, Jumper M0, M1, M2 | 1/32, Jumper M0, M1, M2 | 1/256, Firmware |
|
|
|
|---|---|---|
| A4988 von Oben. | DRV8825 von Oben. | TMC2130 von Unten. |
Wie wichtig eine gute Stromeinstellung ist sieht man an unterem Vergleich:

Der rechte Druck besitzt wellenförmigen Muster am Rand und die Layer sind gegenüber dem linken Druck unpräziser gedruckt.
Den Unterschied macht die Anpassung der Stromstärke durch den Schrittmotor. Genauer gesagt sollte man diesen nicht erhöhen, sondern soweit verringern (Drehung des Potentiometers gegen den Uhrzeigersinn), dass es
zu einer gleichmäßigeren Bewegung kommt. Ein guter Indikator sind die Geräusche des Schrittmotors, die mit kleinerem Strom merklich abnehmen.
| Video zum TMC2130, Verkabelung und Firmware Update unter Marlin. |
Marlin Firmware Anpassungen in Configuration_adv.h zum TMC2130
#define HAVE_TMC2130 //Kommentar entfernen
...
#define X_IS_TMC2130 //Achse und Pinne auswaehlen
...
#define R_SENSE 0.11 // R_sense resistor for SilentStepStick2130
#define HOLD_MULTIPLIER 0.5 // Kann noch bis auf 0.2 reduziert werden
#define INTERPOLATE 1 // Interpolate X/Y/Z_MICROSTEPS to 256
#define X_CURRENT 1000 // Strom der jeweiligen Achse in mA setzen
#define X_MICROSTEPS 16 // 0..256 Mikroschritte setzen
...
#define STEALTHCHOP // Leisen Mode oder auskommentiert SpreadCycle Mode nutzen
In Configuration.h noch die neuen Schrittweiten einstellen:
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,2133,145}
X, Y Achsen Anschluss des TMC2130 auf dem RAMPS Board: